Shanghai Researchers Develop Multi-Modal Flapping-Wing Robot for Advanced Mobility
A robot bug comes in for a landing!
Insects have long been an inspiration for robots. The insect world is full of things that are tiny, fully autonomous, highly mobile, energy efficient, multimodal, self-repairing, and I could go on and on but you get the idea—insects are both an inspiration and a source of frustration to roboticists because it’s so hard to get robots to have anywhere close to insect capability.
We’re definitely making progress, though. In a paper published last month in IEEE Robotics and Automation Letters, roboticists from Shanghai Jong Tong University demonstrated the most buglike robotic bug I think I’ve ever seen.
A Multi-Modal Tailless Flapping-Wing Robotwww.youtube.com
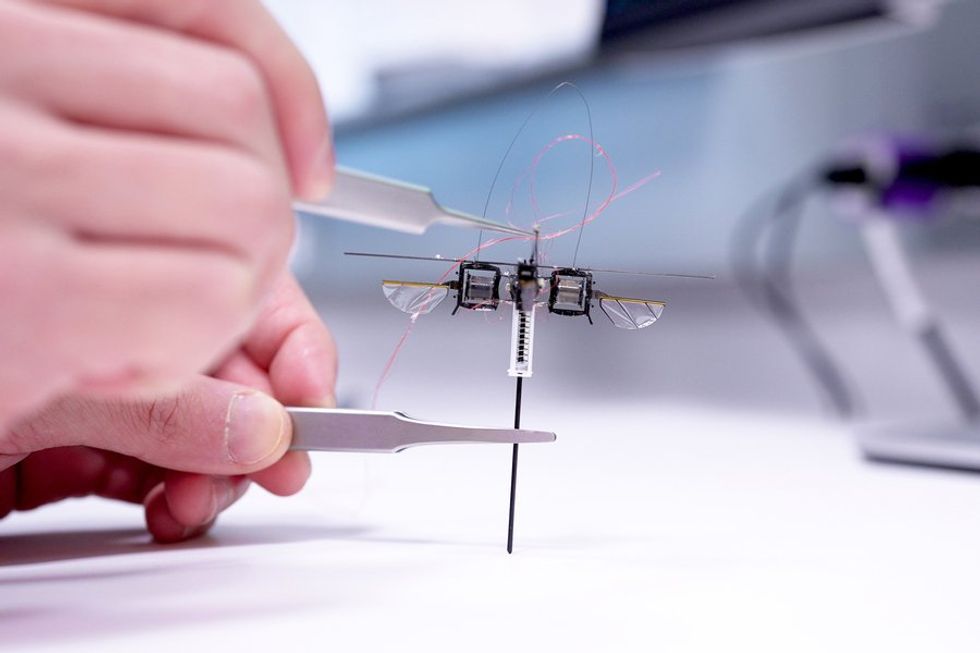
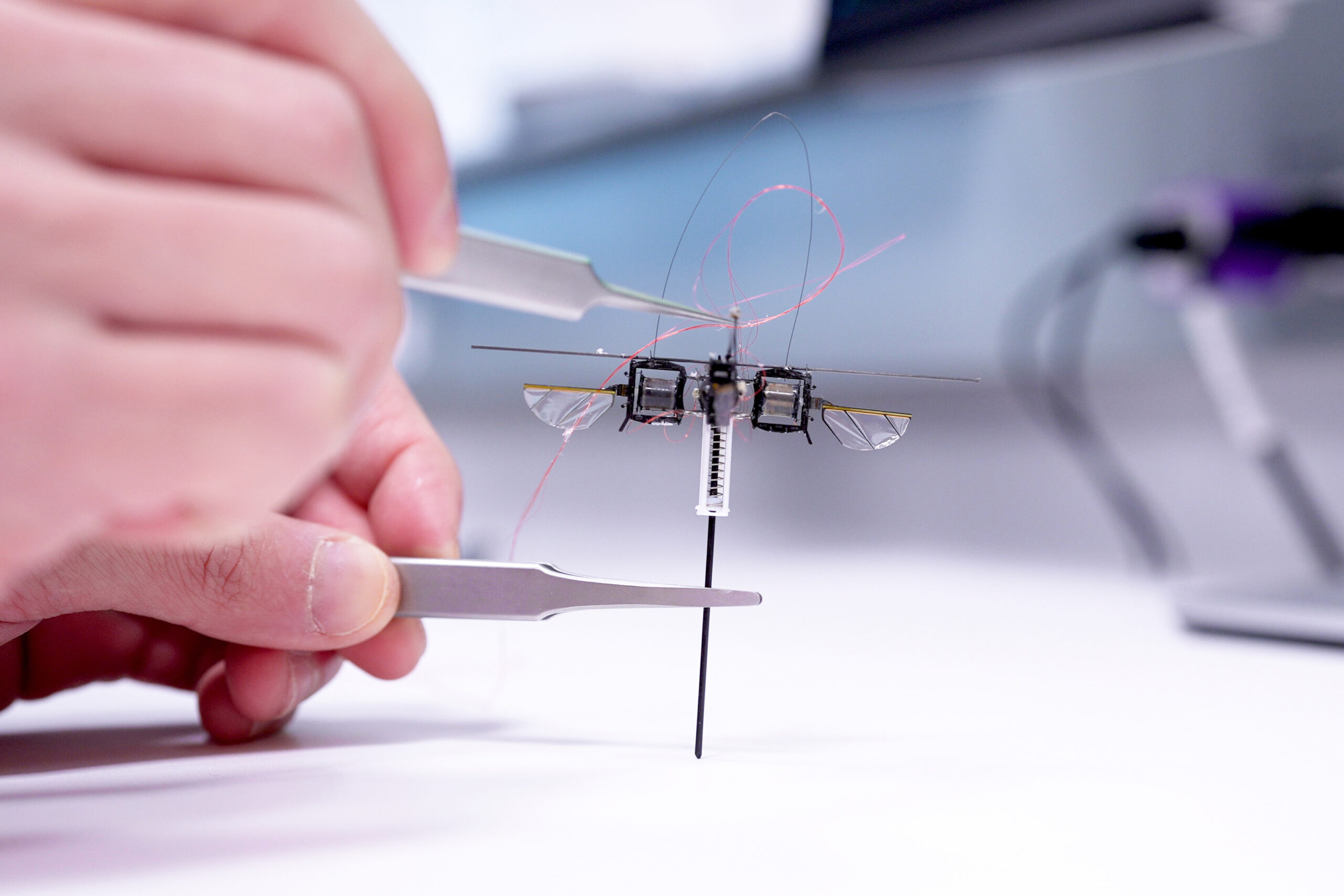
Okay so it may not look the most buglike, but it can do many very buggy bug things, including crawling, taking off horizontally, flying around (with six degrees of freedom control), hovering, landing, and self-righting if necessary. JT-fly weighs about 35 grams and has a wingspan of 33 centimeters, using four wings at once to fly at up to 5 meters per second and six legs to scurry at 0.3 m/s. Its 380 milliampere-hour battery powers it for an actually somewhat useful 8-ish minutes of flying and about 60 minutes of crawling.
While that amount of endurance may not sound like a lot, robots like these aren’t necessarily intended to be moving continuously. Rather, they move a little bit, find a nice safe perch, and then do some sensing or whatever until you ask them to move to a new spot. Ideally, most of that movement would be crawling, but having the option to fly makes JT-fly exponentially more useful.
Or, potentially more useful, because obviously this is still very much a research project. It does seem like there’s a bunch more optimization that could be done here. For example, JT-fly uses completely separate systems for flying and crawling, with two motors powering the legs and two additional motors powering the wings—plus two wing servos for control. There’s currently a limited amount of onboard autonomy, with an inertial measurement unit, barometer, and wireless communication, but otherwise not much in the way of useful payload.
Insects are both an inspiration and a source of frustration to roboticists because it’s so hard to get robots to have anywhere close to insect capability.
It won’t surprise you to learn that the researchers have disaster-relief applications in mind for this robot, suggesting that “after natural disasters such as earthquakes and mudslides, roads and buildings will be severely damaged, and in these scenarios, JT-fly can rely on its flight ability to quickly deploy into the mission area.” One day, robots like these will actually be deployed for disaster relief, and although that day is not today, we’re just a little bit closer than we were before.
“A Multi-Modal Tailless Flapping-Wing Robot Capable of Flying, Crawling, Self-Righting and Horizontal Takeoff,” by Chaofeng Wu, Yiming Xiao, Jiaxin Zhao, Jiawang Mou, Feng Cui, and Wu Liu from Shanghai Jong Tong University, is published in the May issue of IEEE Robotics and Automation Letters.
How useful was this post?
Click on a star to rate it!
Average rating 5 / 5. Vote count: 1
No votes so far! Be the first to rate this post.
We are sorry that this post was not useful for you!
Let us improve this post!
Tell us how we can improve this post?