Description
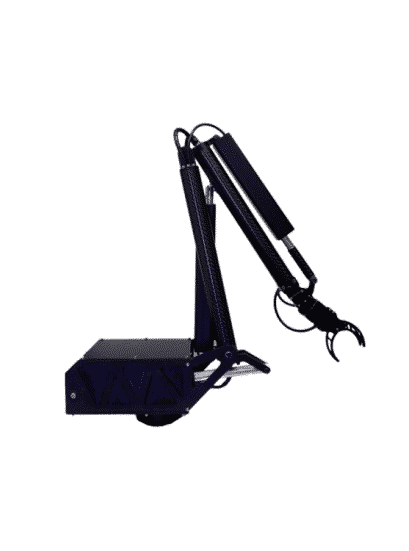
- The GEARWURX ARM 3.0 improves on the ARM 2.0(DISCONTINUED) with better position sensors, more robust linear actuators, and more powerful motor controllers.
- This 6 degree of freedom arm uses linear actuators and rotary servos to provide an operation envelope of over 7 ft in diameter.
- Sealed ball bearings provide precision movement at each joint.
- The lower 4 joints use absolute encoders for precise, linear control.
- Typical current draw at full capacity is approximately 7 amps. Rotation speed of base joint is 60 degrees / second.
- Wrist rotates 240 degrees in 2.3 seconds.
- Gripper moves from fully open to fully closed in less than 1 second.
- A power switch with green LED “on” state indication is located on the electronics enclosure.
- See below for mounting pattern and refer to datasheet below for signal pinout and additional information.
ARM 3.0 Closed-Loop Position Control:
- All joints operate in a closed loop position control mode.
- All joints are PWM ready if you choose to command from your microcontroller or from an RC radio.
- All joints utilize absolute feedback.
- This version of the ARM is best suited for applications where the ARM will be under computer control.
- And where the computer will send a PWM command to the each joint of the ARM to go to a specific position.
- The GEARWURX ARM 3.0 will then hold that position.
ARM 3.0 Open-Loop Velocity Control:
- All joints in this version of the ARM operate in open-loop velocity mode.
- This ARM is most friendly when using a joystick or radio control unit to allow a human operator to directly control the ARM.
- This version of the GEARWURX ARM 3.0 can run out-of-the-box by connecting 12VDC power and any standard RC radio to the input connector.
Specifications:
- Reach envelope: 86.6 in (2.2 m) diameter
- Lift Capacity: 10 lbs (4.5 kg) at full extension
- 6 Degrees of Freedom
- Weight: 20.4 lbs (9.2 kg)
- Interface: RC PWM
- Holds position with power off
- Input: 12 VDC, 7.5A Peak















Reviews
There are no reviews yet.