


Description
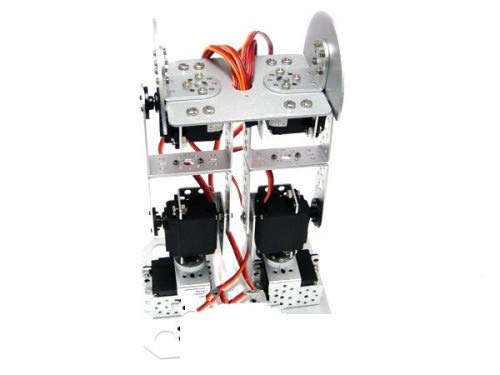
- 6DOF Biped Robot is a professional small humanoid robot consist of full aluminium parts, special non-ferrous oxidation process on surface
- Basically Smooth edges not hurting hands, the metal is unbleached, beautiful and durable, prevent decoloring for long time using.
- Additionaly, The 6DOF Biped Robot has six micro servos, each foot is 3DOF, the robot can both walk forward or backward and crouch, stand up, turn, even can do a lot of forward roll and backward roll.
- Initially, Arches punching, corner cutting to reduce weight, the hole can be attached with soles sensor to detect gait.
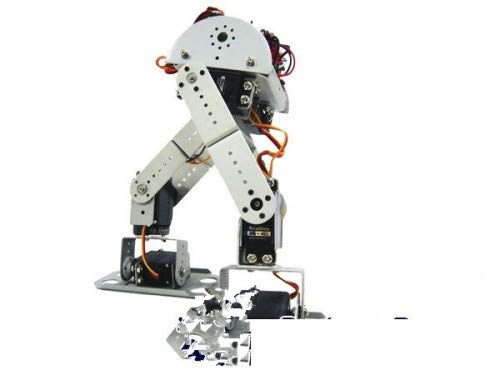
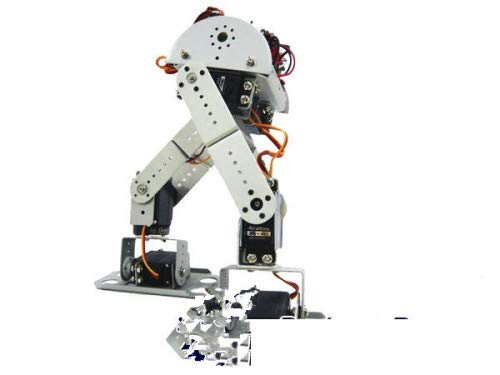
- 6DOF Biped Robot Lengthening straight leg structure raise walking speed, which is beneficial to the Robocup bipedal robot competition.
- Basically The capacious waist could carry the various sensors and visual identity system, tracking and positioning image.
- Additionally The 6 DOF biped robot is built with aluminum plates, aluminum angles,
wood, and rubber materials. - It has two legs, two feet, and one trunk, each leg
having three joints: hip, knee, and ankle. - All joints are actuated by gear head DC
motors with built-in encoders. - 6DOF Biped Robot microcontroller-and-PC-computer-based control system is designed for
the biped robot. - The control system consists of actuators, sensors, controllers,
and a PC computer. - The actuators are the gear head DC motors with H-bridge and circuits.
- The controllers used are two microcontrollers, one for each leg.
- 6DOF Biped Robot The microprocessors read and process joint angle measurements from the encoders
and then transmit them to the PC computer. - Actually At the same time, the microcontrollers receive control signals from the PC computer and transfer them
to the H-bridge circuits to control the robot joints. - Basically Data transfer between the microcontrollers and the PC computer is implemented by two RS232 serial
communication channels. - Basically 6DOF Biped Robot control algorithm works on computer.














Reviews
There are no reviews yet.