
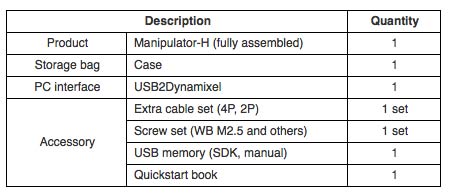
Description
- Basically The ROBOTIS MANIPULATOR-H ROBOTIC Manipulator is a Multi-purpose and affordable robotic arm designed for research and automation projects.
- Additionally The Designed for applications as R&D projects, to be mounted in a mobile manipulator or as a part of a robot torso or a humanoid.
- Afterwards The arm is available in two main configurations, the manipulator-L and also the manipulator-H.
- The “L” configuration has a repeatability of ±0.1 mm, a weight of 4.5kg, 1kg of payload and a 180W power.
- While the “H” configuration has a repeatability of ±0.5 mm, a slightly higher weight (5.5 kg), a payload of 3 kg and a power of 640W.
- The main characteristics of the ROBOTIS MANIPULATOR-H ROBOTIC are its lightweight for an easy placement and also for transferring.
- A modular design for an easy maintenance and its competitive price.
- Both configurations have 6 DOF and also an optional gripper with one degree-of-freedom.
Features:
- Multi-purpose, low-cost manipulator.
- 6 DOF (built with Dynamixel Pro).
- Modular structure for easy maintenance.
- Lightweight design for easy placement and mobility.
- Endures payload suitable for small to mid scale operations.
- Wide operation range.
- Suitable for repetitive and high precision operation.
- USB interface, RS-485 communication.
- ROBOTIS MANIPULATOR-H ROBOTIC Provides SDK for user programming.
- (provides examples of forward / inverse kinematics, profile control).
- Minimized module size with the self-developed small, lightweight, cycloid reduction gear
- High weight to output rate (0.05Nm/g)
- High shock resistance
- Incremental encoder and contactless magnetic encoder for absolute positioning
- Low backlash of 3~4arcmin
- Performance data provided, tested by KOLAS (Korea Laboratory Accreditation Scheme)
- High current sensing algorithm and current feedback control
- Position, speed, and current control using an algorithm
- Provides C-based library
- Provides various solution examples (C , LabVIEW, C#, eclipse, JAVA, etc.)
- The main characteristics of the ROBOTIS Manipulator are its lightweight for an easy placement and transferring.
- A modular design for an easy maintenance and its competitive price.
- Both configurations have 6 DOF and an optional gripper with one degree-of-freedom.














Reviews
There are no reviews yet.