Description
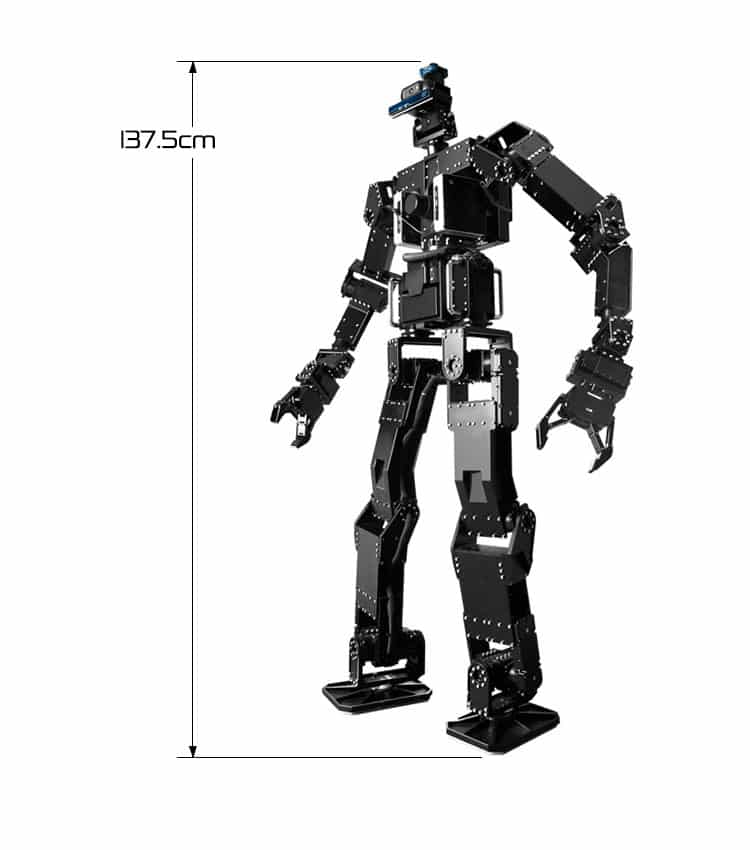
- The THORMANG3 OPEN PLATFORM HUMANOID ROBOT is a open source, full size humanoid robot with 7DOF arms and a 2DOF head that can manipulate objects and perform a variety of tasks.
- THORMANG3 OPEN PLATFORM HUMANOID is designed for research and advanced robotics projects.
- This Linux based robot comes with a Logitech C920 HD camera, Intel Real sense, sensors, battery, speaker, gripper, LIDAR, network hub, and everything you need to get started.
Features:
- Stable Walking with Human-Friendly Scale
- Mission Capability using Adaptive Gripper
- Powerful Dual PC-level Computing with Intel NUC
- Various Sensing with Force/Torque Sensor, LIDAR/IMU/Camera
- Full ROS Support with 3D CAD data and Open-Source SDK
- DYNAMIXEL PRO based Modular Design with Full Metal Body
- Best for SLAM, Locomotion, Manipulation and HRI Research.
- DYNAMIXEL PRO H-Series x 29 DOF
- Easy Maintenance and Customizing
- Full ROS Support with 3D CAD, Open-Source SDK
- Rviz, PCL, MoveIt Plug-in
- Gazebo 3D Simulator
- 1x Fully Assembled THORMANG3
- 1x Battery Pack
- 1x Battery Charger
- 1x Maintenance KIT
- 1x Lift
- 1x Carry Case
- Research and Development for rescue missions involving hazardous environments not suitable for humans.
- Robotics Research.
- Sports and Competitions.
- Availability: 12 weeks upon order confirmation.
- Basic installation and maintenance training upon delivery
- Comes with 1 year warranty.
| Weight | 42 lbs |
|---|---|
| Dimensions | 137.5 in |
| Controller (PC) | Intel NUC5i5RYK (2Set) |
| Sensor | Logitech C920 HD Camera; Intel Realsense; Hokuyo UTM-30LX-EW; F/T Sensor: ATi Mini58-SI-2800-120 x 2; IMU: MicroSrain 3DM-GX4-25. |
| Actuator | DYNAMIXEL PRO H-Series |
| DOF | Head: 2DOF; ARM: 7DOF x 2; Waist: 1DOF; Under body: 6DOF x 2 (gripper x 2). |
| Battery | LIPO 22.2V 22,000mA & 18.5V 11,000mA |
| Operation System | Linux Ubuntu 14.04.3 64bit |
| Software | ROS indigo / GNU C++(g++) |
| Library | Motor Control, Manipulation, Head Control, Walking Engine, Sensor control |
- Stable Walking with Human-Friendly Scale
- DYNAMIXEL Pro based Modular Design with Full Metal Body
- Powerful Dual PC-level Computing with Intel NUC
- Various Sensing with Force/Torque Sensor, LIDAR/IMU/Camera
- Mission Capability using Adaptive Gripper
- Best for SLAM, Locomotion, Manipulation and HRI Research
- Full ROS Support with 3D CAD data and Open-Source SDK












Reviews
There are no reviews yet.